New research from the U.K. could help make it easier to design and deploy unmanned vehicles used to survey underwater landscapes.
Autonomous underwater vehicles – robotic vehicles that travel underwater without requiring input from an operator – have been around and in use for almost 50 years, but ensuring their ability to avoid obstacles (including each other) is particularly challenging. It typically involves the use of a two-dimensional plane that requires the vehicles to consistently maintain a specific distance and approach angle from each other, such as a triangle-shaped formation.
Researchers from Queen’s University Belfast, however, have been testing a new approach involving a 3D environment, and the results suggest it could significantly cut down inefficiencies and power usage through stable trajectories. This could ultimately make it faster and less expensive to conduct underwater mapping and surveying.
“By switching between a 2D and 3D approach, vehicles can be guided cooperatively using just their separation distance as a constraint, requiring less power than previously needed to guide a rigid formation,” said David McIntyre, researcher at Queen’s University Belfast.
“Rotational potential fields” –previously only used in obstacle avoidance and mainly implemented in two-dimensional planes – use repulsion in a circular motion around an obstacle or object. Though research is limited, autonomous underwater vehicles sometimes use traditional “artificial potential fields,” which use virtual forces that gravitate towards the desired location. But in this proposed approach, the autonomous underwater vehicles utilize opposing rotational fields to survey objects of interest.
Picture it like this: two cars are side-by-side on an empty road with a roundabout up ahead. Traditional potential fields essentially pull the cars across the center of the roundabout, directly to the selected exit. Rotational potential fields, though, repel them around the edge, ultimately staying on the road and the roundabout, instead of through it.
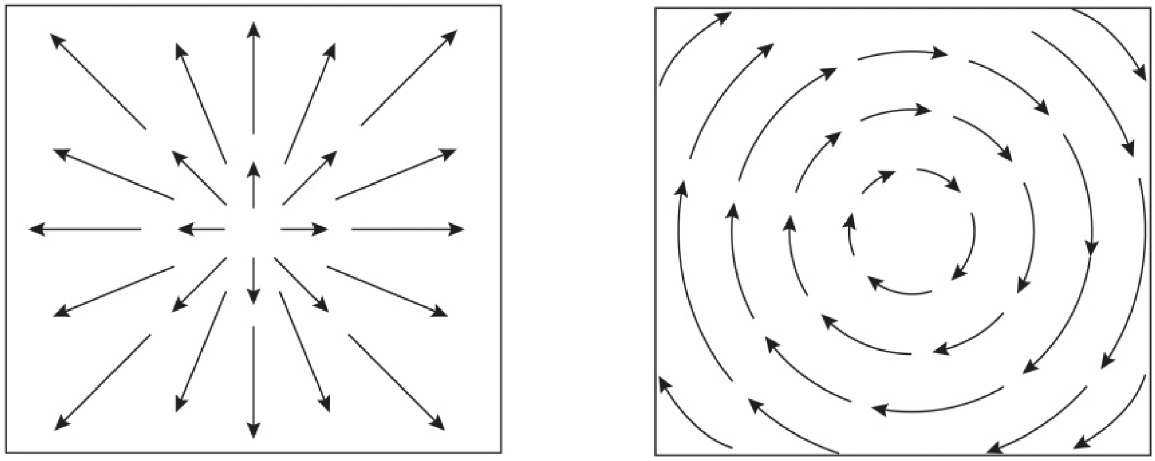
Figure 1: Traditional artificial potential fields (left) versus rotational potential fields (right)
In other words, the 3D approach and the two types of potential fields allow the vehicles to deliberately, and more accurately, travel towards objects of interest. Similar to the figure below, the fluid formation of the vehicles is achieved using traditional potential fields, with rotational fields taking over after.
“For the fluid formation approach, only their distance is used to keep the autonomous underwater vehicles together, so they can have any orientation towards each other when travelling towards the object of interest, “said McIntyre. “As this requires less rigid movements, it will ultimately reduce power usage.” The traditional fixed shape (square, triangles, etc.) formations required both set distances and angles, making McIntyre’s fluid formation approach more efficient and cost-effective.
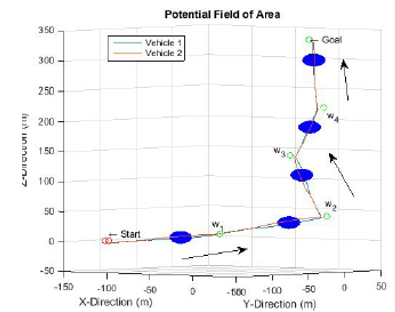
Figure 2: Simulation of autonomous underwater vehicles circling objects before reaching the goal position
The researchers have run various simulations using this approach and believe it could be useful for surveying applications such as off-shore oil rig platforms, piers, off-shore wind farms, underwater military mines, or even wildlife surveying.
Beyond underwater mapping and surveying, there is a growing need for underwater autonomous vehicles in many areas, including search and rescue, structure inspection and pollution tracking.
Learn more about autonomous underwater vehicles in IEEE Xplore.