

A new framework developed by U.S. researchers may be the key to creating humanoid robots that can interact with people in various situations and follow their instructions. But the research also shows more affordable hardware still has a long way to go before robots become a part of the average person’s daily routine.
Most humanoid robots – robots constructed to resemble humans – are very sophisticated but designed for single-use purposes. This prevents businesses from being able to scale them to fit their needs. For example, a custom-made humanoid robot with manufacturing line duties may not be equipped with the right components to successfully fit in a hospital setting.
Aiming to solve this lack of versatility, the University of Virginia researchers attempted to manipulate a newly released, low-cost, open-source robotics kit (HR-OS1) to be used across untapped, practical and widespread applications.
“Our goal was to create a robot that anyone could use, even if it wasn’t as sophisticated as the custom-made ones coming out of other research labs,” said Matthew Baron, former researcher at the University of Virginia. “Our robot cost about $1,600. I haven’t seen any comparable robots for under $20,000.”
After acquiring the open-source, HR-OS1 robot (in Figure 1 below), the team came together to imagine the types of roles these non-specialized robots could play in personally assisting humans in society. For this research, they looked at one of the most-mundane weekly errands: a trip to the grocery store.

Figure 1: HR-OS1 humanoid robot prototype
Creating a retail attendant required the robot to be able to move, identify objects, hear, speak, and perform simple math – tasks that would be useful across many environments. To incorporate these components, the researchers developed a main state machine framework, which can be seen in Figure 2. Through a series of “states” – waiting, confirmation, listening, checkout, scanning and guidance – the robot can interact with a grocery store shopper and change its state based on the shopper’s asks and needs.
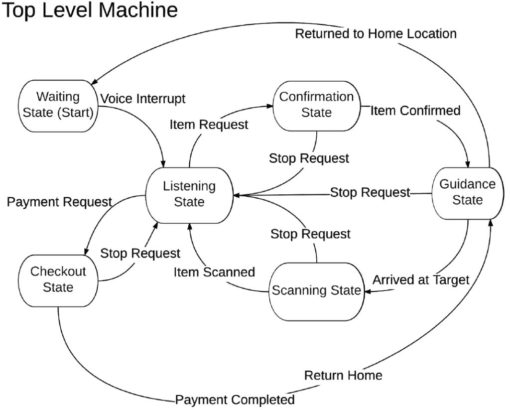
Figure 2: Diagram of the robot’s main state machine framework
If a shopper requests the location of the cereal aisle, the robot would transition from the initial ‘waiting state’ to the ‘listening state.’ After addressing the shopper’s question in the ‘confirmation state,’ the shopper’s next response could trigger the robot’s other various states (guidance or listening).
With state changes such as this requiring extensive inputs and outputs, the researchers incorporated the Robotic Operation System (ROS), an existing, open-source solution designed to manage the communications between the different states. The ROS system allows the robot to track the questions it should be asking, whether it should be walking, whether it should wait to scan, and so forth.
Once all components and algorithms were put in place, the robot was tested in an environment developed to resemble the features of a real retail store. Though the robot could successfully identify signs and make its way back to the starting position, the team identified a set of shortcomings and challenges on the hardware side.
“Very few people are working on the scale problem, developing both hardware and software that is cheap enough to make it into people’s homes or businesses,” said Baron. “I think this is exactly the problem that people in the industry should take on – taking technology that already exists and making it available for the diverse needs of many people.”
As Baron noted, with a goal of creating a customizable and low-cost robot, research constraints like the robot’s walking ability and speed were a major issue. This shows that more work is needed before implementing robots across practical applications is truly possible.
Despite these challenges, the team met its goal and successfully created an ROS and main state machine framework that can be used and adapted for a variety of settings, including retail stores, elderly homes, and tourist destinations.
“The beauty of the open-source movement is that anyone should be able to open and edit code easily,” said Baron. “The entire framework was designed with personalization and modifications in mind.”
For more information on humanoid robots, visit the IEEE Xplore Digital Library.



